



Содержание
Перейти к:
 В. В. Сизонов,
А. Г. Макаров,
С. М. Пакус,
Д. Г. Кварацхелия,
Е. В. Орлова,
С. Г. Пискунова,
М. И. Коган
В. В. Сизонов,
А. Г. Макаров,
С. М. Пакус,
Д. Г. Кварацхелия,
Е. В. Орлова,
С. Г. Пискунова,
М. И. Коган https://doi.org/10.21886/2308-6424-2025-13-2-47-54
Перейти к:
Введение. Роботическая пиелопластика — наиболее частое хирургическое вмешательство, выполняемое в мире с использованием роботической платформы da Vinci у детей. Нами представлен первый опыт выполнения робот-ассистированной лапароскопической пиелопластики (РАЛП) с использованием системы da Vinci Xi.
Цель исследования. Провести анализ опыта выполнения РАЛП у детей с использованием роботической платформы da Vinci Xi.
Материалы и методы. В период с июля по октябрь 2024 года выполнено 14 РАЛП. Среди больных было 7 (50%) мальчиков и 7 (50%) девочек. Средний рост пациентов составил 131,2 ± 22,1 см, средняя масса тела — 29,7 ± 15,0 кг. У 11 (78,5%) пациентов имел место гидронефроз 3-й степени по SFU, у 3 (21,5%) — гидронефроз 4-й степени. Внутренняя причина обструкции пиело-уретерального сегмента (ОПУС) выявлена у 6 (43%) пациентов, внешняя причина («конфликтный» сосуд) — у 8 (57%) пациентов. Всем пациентам была выполнена робот-ассистированная расчленяющая пиелопластика без редукционной резекции лоханки. Операцию выполняли в положении на противоположном по отношению к обструкции боку. Доступ осуществляли, установив три 8-мм троакара для введения оптики и роботических инструментов и одного 5-мм — для введения инструментов ассистентом.
Результаты. В серии случаев конверсий не было. Общее время оперативного вмешательства на начальных этапах составляло 195 минут, на настоящий момент время, затраченное на выполнение операции, сократилось до 110 минут. Средняя продолжительность операции составила 146,7 ± 29,3 минуты. Время докинга на начальных этапах составляло 60 минут, затем по мере освоения сократилось в среднем до 25,0 ± 10,8 минуты. Консольное время составляло на начальных этапах 150 минут, на настоящий момент тайминг сократился до 70 минут. Среднее консольное время операции при внутренних причинах ОПУС составило 82,0 ± 16,0 минуты, при внешних причинах — 93,0 ± 27,0 минуты. В послеоперационном периоде у одного пациента отмечалась дисфункция стента, которая была устранена без замены стента.
Заключение. Начальный опыт РАЛП демонстрирует в качестве преимущества по сравнению с лапароскопической пиелопластикой (ЛП) сохранение физических кондиций оператора на всём протяжении формирования анастомоза, позволяющих формировать анастомоз максимально прецизионно, избегая компромисса между желаемым качеством наложения интракорпорального шва и реальным результатом на фоне неизбежной физической усталости оператора при использовании лапароскопического доступа. Текущие результаты позволяют предположить, что приобретённый нами двадцатилетний опыт в ЛП заметно ускоряет процесс освоения роботической платформы, оптимизируя продолжительность консольного времени и в кратчайшие сроки выйти на плато консольного времени.
Сизонов В.В., Макаров А.Г., Пакус С.М., Кварацхелия Д.Г., Орлова Е.В., Пискунова С.Г., Коган М.И. Первый российский опыт робот-ассистированной лапароскопической пластики лоханочно-мочеточникового сегмента у детей на роботической системе da Vinci Xi. Вестник урологии. 2025;13(2):47-54. https://doi.org/10.21886/2308-6424-2025-13-2-47-54
Sizonov V.V., Makarov A.G., Pakus S.M., Kvaratskhelia D.G., Orlova E.V., Piskunova S.G., Kogan M.I. Robot-assisted laparoscopic ureteropelvic junction plasty in children using the da Vinci Xi robotic system: a Russian first experience. Urology Herald. 2025;13(2):47-54. (In Russ.) https://doi.org/10.21886/2308-6424-2025-13-2-47-54
Обструкция пиелоуретерального сегмента (ОПУС) — самая частая причина хирургических вмешательств на верхних мочевых путях у детей. С середины прошлого века стандартом хирургии гидронефроза являлась открытая расчленяющая пиелопластика. В 1996 году C.A. Peters et al. представили результаты первой серии педиатрических лапароскопических пиелопластик (ЛП) [1]. С этого момента малоинвазивная хирургия гидронефроза постепенно приобретала популярность и в настоящее время замещает открытую хирургию, несмотря на достаточно продолжительный период обучения, сложности формирования эндокорпорального шва и эргономики. Появление роботической системы da Vinci открыло новый этап внедрения малоинвазивных технологий в хирургическом лечении гидронефроза у детей. Первые результаты использования робот-ассистированной лапароскопической пиелопластики (РАЛП) у детей представили R.S. Lee et al. в 2006 году [2].
В 2024 году Ростовская областная детская клиническая больница стала первой детской клиникой в России, оснащённой роботической системой da Vinci Xi, к преимуществам которой относят десятикратный уровень увеличения и получение трёхмерной картины операционного поля, улучшенная эргономика, подавление тремора, большая степень свободы в работе инструментов и наличие «эндозапястья» (технология endowrist), высокотехнологичную консоль пациента с возможностью боковой стыковки.
Нами обобщён и представлен опыт первых 14 роботических пиелопластик, выполненных в течение 2024 года, что явилось целью исследования.
В период с июля по октябрь 2024 года выполнены 14 операций по поводу ОПУС с использованием роботической платформы da Vinci Xi (da Vinci Surgical System, “Intuitive Surgical, Inc.”, Sunnyvale, CA, USA)
Предоперационная диагностика гидронефротической трансформации почки включала ультразвуковое исследование почек на фоне и без диуретической нагрузки, спиральную компьютерную томографию органов забрюшинного пространства с контрастированием, магниторезонансную томографию, динамическую диуретическую нефросцинтиграфию.
Показанием к операции являлись: гидронефротическая трансформация почки III – IV степени по SFU, снижение дифференциальной почечной функции на стороне поражения ниже 40% или её снижение в процессе динамического наблюдения. Клинические проявления обструкции — приступы боли в животе, сопровождавшиеся увеличением расширения чашечно-лоханочной системы, по данным ультразвукового исследования.
Всем пациентам была выполнена робот-ассистированная расчленяющая пиелопластика без редукционной резекции лоханки. Используемый набор роботических инструментов — диссектор Maryland с биполярной коагуляцией, иглодержатель, изогнутые ножницы с монополярной коагуляцией. В положении пациента на боку, противоположному стороне гидронефроза, устанавливали три 8-мм роботических троакара для роботических инструментов и один дополнительный 5-мм порт для работы ассистента (рис. 1).
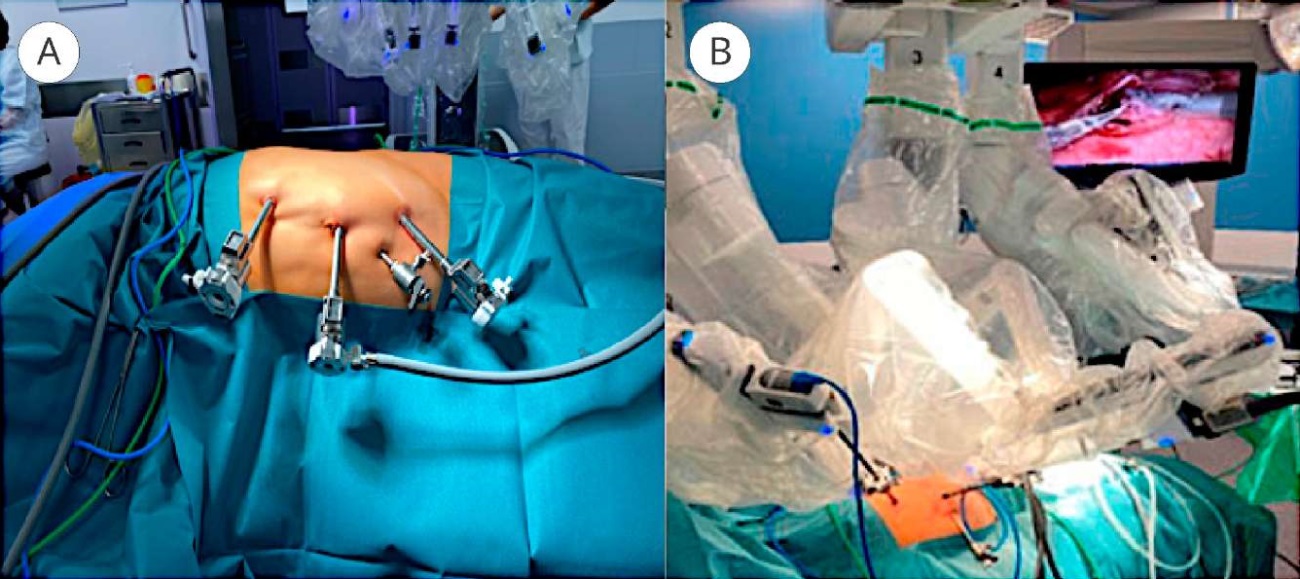
Рисунок 1. Расположение троакаров для пиелопластики слева (А), выполнена стыковка робота (В)
Figure 1. Trocar placement for left-sided pyeloplasty (A), robot docking performed (B)
Доступ к почке осуществляли через линию Toldt либо трансмезентерильно. После выделения лоханки и пиелоуретерального сегмента последний резецировали, лоханку брали на держалку, мочеточник спатулировали (рис. 2).
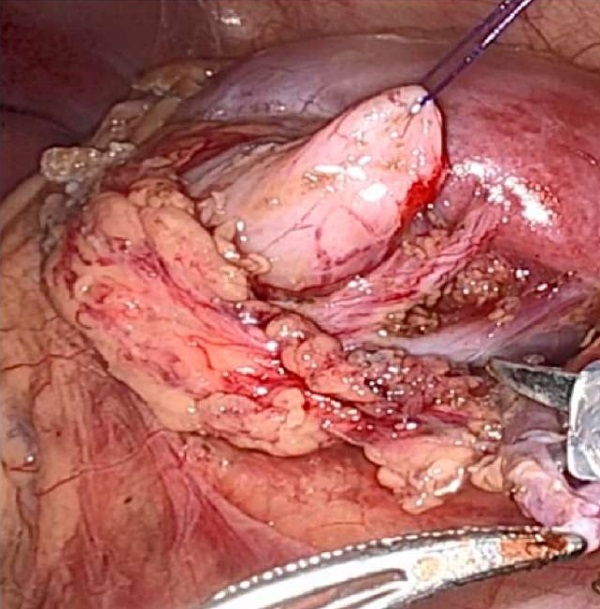
Рисунок 2. Интраоперационная картина: лоханка выделена, взята на держалку, произведена резекция пиелоуретерального сегмента, выполняется спатуляция мочеточника
Figure 2. Intraoperative view: the pelvis is isolated, suture-retaining, UPJ is resected, ureteral spatulation is performed
Анастомоз во всех случаях формировали отдельными узловыми швами с помощью нити Monocyn 5/0, изгиб иглы 3/2 (рис. 3).
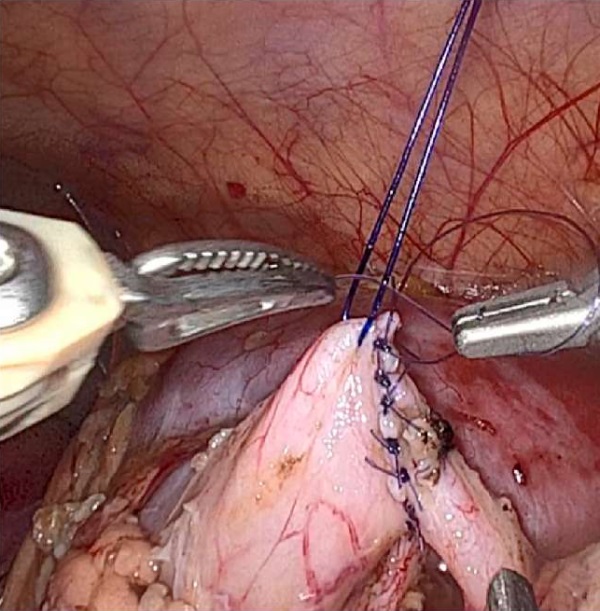
Рисунок 3. Формирование пиелоуретерального анастомоза
Figure 3. Formation of ureteropelvic anastomosis
Восстановление целостности париетальной брюшины производили во всех случаях. У 12 (85,7%) детей верхние мочевые пути дренировали с помощью пиелостомы, у 2 детей (14,3%) использовали мочеточниковый стент, устанавливаемый антеградно. В одном (7,1%) случае выполнено дренирование брюшной полости, в двух (14,2%) случаях произведено дренирование паранефральной области.
Статистический анализ. Для обработки данных и проведения методов статистического анализа было использовано программное обеспечение Statistica v.10.0 (StatSoft Inc., Tulsa, OK, USA). Все качественные клинические показатели представлены в виде количественных показателей (n) и долей / частот (%). Для характеристики рассеивания значений количественных признаков вычислено среднее значение (M) и относительные показатели вариации — стандартное отклонение (SD).
Средний возраст пациентов, перенёсших оперативное вмешательство, составил 8,2 ± 3,7 года, средний рост — 131,2 ± 22,1 см, средняя масса тела — 29,7 ± 15 кг, 7 (50%) мальчиков, 7 (50%) девочек. У 5 (35%) пациентов гидронефротическая трансформация была выявлена антенатально, у 9 (65%) — постнатально. Гидронефроз справа диагностирован у 5 пациентов, слева — у 9 пациентов. Клинические проявления гидронефроза присутствовали у 2 пациентов (14,3%): в обоих случаях отмечалась почечная колика, в ипсилатеральном подреберье удавалось пальпировать увеличенную в размере почку. У 11 (78,5%) пациентов выявлен гидронефроз 3-й степени по SFU, у 3 (21,5%) — гидронефроз 4 -й степени по SFU. Внутренняя причина ОПУС определена у 6 (43%) пациентов, внешняя причина («конфликтный» сосуд) — у 8 (57%).
В данной серии случаев конверсий не было. В послеоперационном периоде у одного пациента отмечалась дисфункция мочеточникового стента, которая была устранена без замены стента.
Общее время оперативного вмешательства при первых операциях составляло 195 минут, у пациентов, оперированных последними в серии, общее время хирургии сократилось до 110 минут, средняя продолжительность операции составила 146,7 ± 29,3 минуты. Динамика продолжительности времени операции представлена на рисунке 4.
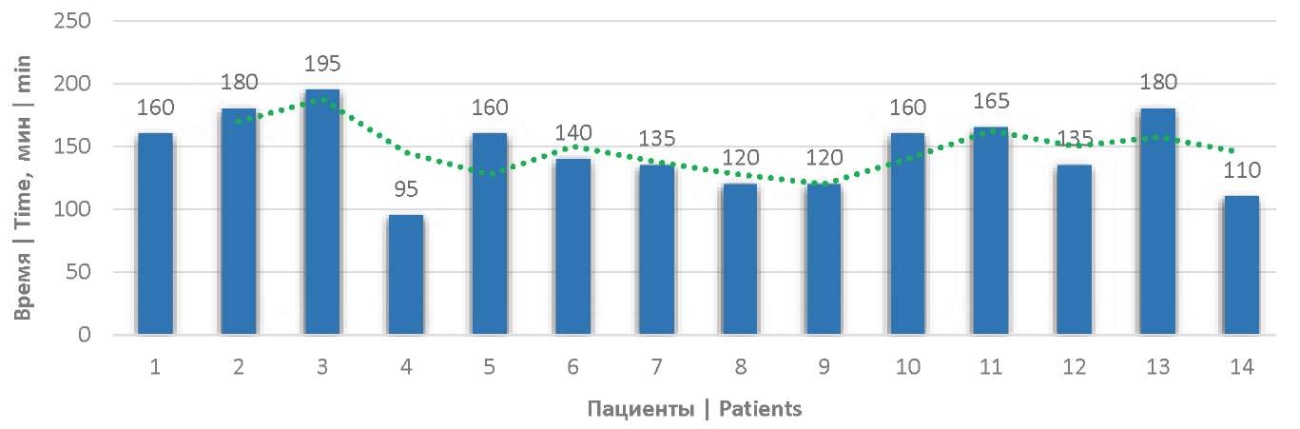
Рисунок 4. Общее время операции
Figure 4. Total operation time
Время установки троакаров и докинга в первом случае составляло 60 минут. По мере освоения технологии среднее время докинга в серии составило 25 ± 10,8 минуты (рис. 5)
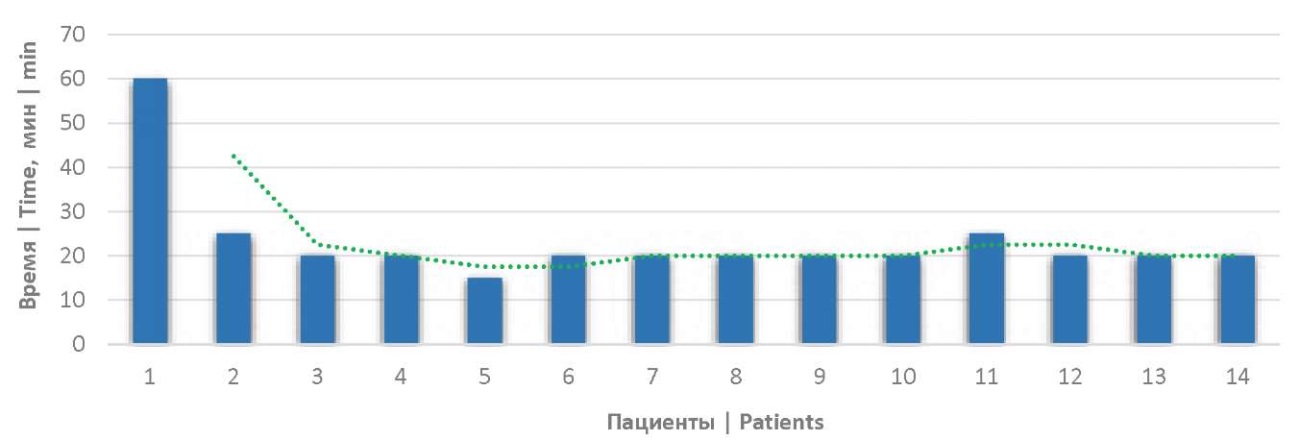
Рисунок 5. Динамика времени докинга
Figure 5. Dynamics of docking time
Консольное время составляло на начальных этапах 150 минут, на настоящий момент тайминг сократился до 70 минут (рис. 6). Среднее консольное время операции при внутренних причинах ОПУС — 82 ± 16 минут, при внешних причинах — 93 ± 27 минут (рис. 6).
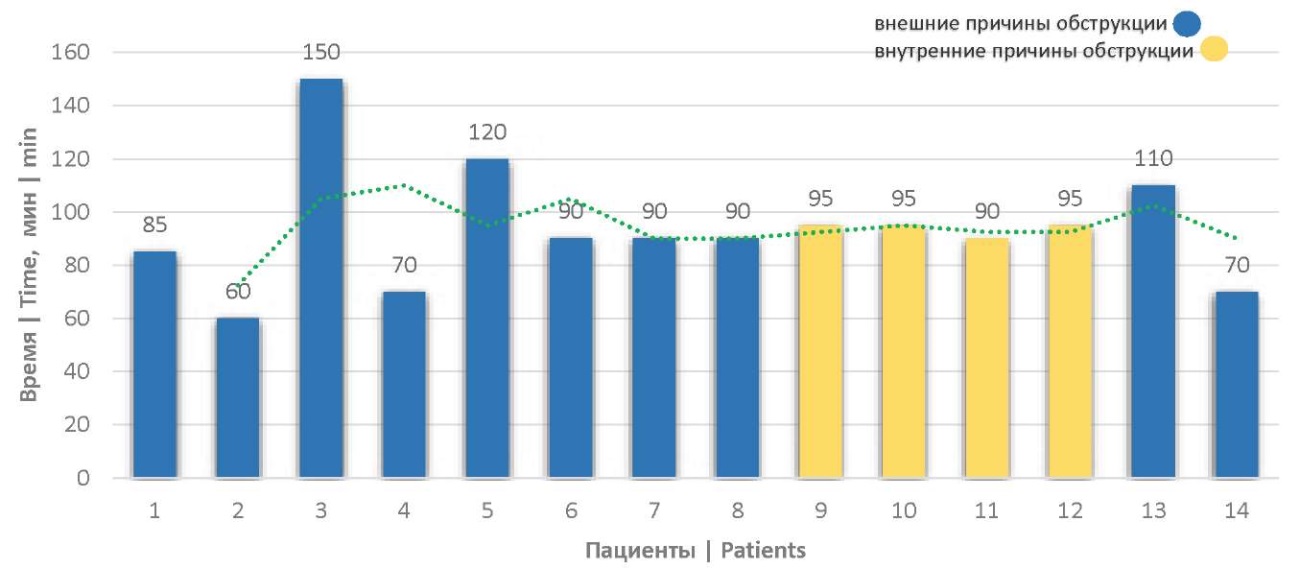
Рисунок 6. Динамика консольного времени
Figure 6. Dynamics of console time
На данный момент 10 пациентам прекращено дренирование верхних мочевых путей: у 8 пациентов в связи с достижением оптимальных показателей при проведении теста Paquin (менее 15 мм вод. ст.), у 2 пациентов произошло внеплановое удаление дренажной системы в связи с ненадлежащим уходом и ошибками при перевязках на амбулаторном этапе. Обе группы пациентов находились под наблюдением в стационаре, повторное дренирование не потребовалось ни в одном из случаев.
Таким образом, использование роботизированной платформы в хирургическом лечении ОПУС продемонстрировало отсутствие хирургических осложнений, достаточно быструю кривую обучения, прогрессивное снижение длительности операции и связанное с этим сниженное потребление препаратов для анестезии. Отмечена низкая морбидность, быстрые сроки выписки из стационара.
Несмотря на ограниченность высокодоказательных исследований, посвящённых роботическим методикам, в настоящее время в научной литературе доступно 3 метаанализа и систематический обзор, посвященные результатам РАЛП.
В исторически первом метаанализе L.H. Braga et al. (2009) в период первоначального накопления опыта РАЛП было показано сокращение времени операции на 10 минут в качестве единственного преимущества роботизированного подхода, при этом остальные оцениваемые критерии были эквивалентны показателям, характерным для ЛП [3].
B.К. Varda et al. (2017) проанализировали динамику использования различных методик доступа при пиелопластике у детей в США на основании ретроспективного когортного исследования данных общенациональной выборки госпитализаций и операций по поводу гидронефроза в США в период с 2003 по 2015 годы [4]. В течение периода исследования было выполнено 11 899 пиелопластик: 75% открытых, 10% ЛП и 15% РАЛП. Общее количество пиелопластик ежегодно снижалось на 7%; число открытых операций снижалось на 10%, а РАПЛ росло на 29% ежегодно. В 2015 году доля РАЛП-операций составила 40% случаев, количество ЛП сведено к минимуму, ЛП не имеют широкого распространения в США, одновременно с этим число открытых пиелопластик сохраняется на уровне 50%. Возможно, отсутствие широкого распространения лапароскопических операций, а следовательно, отсутствие преемственности при переходе от ЛП к РАЛП является причиной достаточно высокой продолжительности РАЛП у детей в США. Среднее время операции составило 190 минут для открытого вмешательства против 240 минут для РАЛП.
В работе M.S. Silay et al. (2020) представлены результаты рандомизированного контролируемого исследования, целью которого было сравнение результатов ЛП с РАЛП при лечении обструкции лоханочно-мочеточникового сегмента у детей [5]. В исследовании принимали участие 53 пациента, разделенные на 2 группы, — ЛП и РАЛП (27 и 26 пациентов соответственно), средний возраст которых составил 4,6 года. Статистических различий между группами с точки зрения пола, индекса массы тела, предоперационной функции почек, переднезаднего диаметра лоханки и наличия аберрантного сосуда не было.
Среднее общее время операции в группе ЛП было больше, чем РАЛП (139 минут и 105 минут соответственно). Пребывание в больнице было аналогичным в двух группах. Послеоперационные осложнения и показатели успеха в первой и второй группах были сопоставимы за время наблюдения. Однако двое пациентов из группы ЛП нуждались в повторной пиелопластике. Как ЛП, так и РАЛП показали сопоставимые показатели в безопасности и эффективности оперативного вмешательства у детей. Время операции в первой группе (ЛП) было больше, но в то же время во второй группе (РАЛП) стоимость оперативного вмешательства была соответственно выше.
По мере накопления опыта при последующей оценке M. Sun et al. (2023) представили метаанализ 26 исследований, с включением 6074 случаев пиелопластик [6]. Авторами не выявлено статистически значимых различий между результатами РАЛП и ОП, однако отмечено, что при РАЛП отмечается меньшая продолжительность госпитализации, сокращается время операции, уменьшается частота развития гипертермии и потребность в анальгетиках.
C. Esposito et al. (2021) путём анкетирования европейских экспертов, использующих в своей практике роботическую платформу у детей, пришли к ряду выводов: пороговая масса тела пациента для использования роботической системы — более 10 – 15 кг; хирургу необходимо провести 20 – 30 операций на платформе для появления уверенности в роботических операциях; пиелопластика является основной областью применения роботической платформы; главными преимуществами роботизированной операции, по мнению экспертов, являются ловкость управления, максимально удобное формирование эндошва и лучшая эргономика при работе оператора [7].
В недавнем систематическом обзоре, представленном С. Esposito et al. (2023), отмечено, что успех «педиатрической» РАЛП в настоящее время составляет от 90 до 100%. По сравнению с открытой или с ЛП РАЛП предполагает более короткое пребывание в стационаре и меньшее использование анальгетиков [8]. То, что раньше было отрицательной переменной, а именно: более длительное время операции по сравнению с другими методиками доступа, постоянно улучшается, прежде всего в центрах с большим объёмом хирургических вмешательств и опытом хирургов.
Ю.А. Козлов с соавт. представили опыт использования роботической платформы Versius в детской урологии в России [9]. Авторами были выполнены 19 роботизированных вмешательств. В ходе операции использовали 4 порта: один троакар 12 мм — для оптики, два троакара по 5 мм — для роботических манипуляторов, троакар 5 мм — для работы ассистента в ходе роботической операции. Были прооперированы 19 детей, из которых — 11 (58%) мальчиков и 8 (42%) девочек. Средний возраст на момент операции составил 10,4 ± 4,2 года, а средний вес на момент операции — 41,0 ± 16,2 кг. Авторы выполнили 8 пиелопластик (32%). Среднее время операций составило 142,2 ± 49,7 минуты (медиана — 140,0 минут). Операции не сопровождались интраоперационными осложнениями. Авторы пришли к выводу, что роботическая платформа может безопасно и эффективно применяться у детей с урологической патологией.
В настоящее время отмечается непрерывный рост использования роботизированных технологий в детской урологии, что в обозримом будущем приведёт к вытеснению традиционных методик пиелопластики в педиатрической практике. Анализ первого опыта РАЛП демонстрирует в качестве её преимущества по сравнению с ЛП сохранение физических кондиций оператора на всём протяжении формирования анастомоза, позволяющих формировать анастомоз максимально прецизионно, избегая компромисса между желаемым качеством наложения интракорпорального шва и реальным результатом на фоне неизбежной физической усталости оператора при использовании лапароскопического доступа. Представленные результаты позволяют предположить, что приобретённый нами двадцатилетний опыт в ЛП заметно ускоряет процесс освоения роботической платформы, оптимизируя продолжительность консольного времени, позволяя в кратчайшие сроки выйти на плато консольного времени.
В нашем исследовании РАЛП продемонстрировала свою безопасность и эффективность, однако высокая стоимость остаётся ограничением роботизированной хирургии, в настоящее время необходимо проведение дальнейших высококачественных проспективных наблюдательных исследований и клинических испытаний данной инновационной методики.
1. Peters CA. Complications in pediatric urological laparoscopy: results of a survey. J Urol. 1996;155(3):1070-1073. PMID: 8583567
2. Lee RS, Retik AB, Borer JG, Peters CA. Pediatric robot assisted laparoscopic dismembered pyeloplasty: comparison with a cohort of open surgery. J Urol. 2006;175(2):683-687; discussion 687. DOI: 10.1016/S0022-5347(05)00183-7
3. Braga LH, Pace K, DeMaria J, Lorenzo AJ. Systematic review and metaanalysis of robotic-assisted versus conventional laparoscopic pyeloplasty for patients with ureteropelvic junction obstruction: effect on operative time, length of hospital stay, postoperative complications, and success rate. Eur Urol. 2009;56(5):848-857. DOI: 10.1016/j.eururo.2009.03.063
4. Varda BK, Wang Y, Chung BI, Lee RS, Kurtz MP, Nelson CP, Chang SL. Has the robot caught up? National trends in utilization, perioperative outcomes, and cost for open, laparoscopic, and robotic pediatric pyeloplasty in the United States from 2003 to 2015. J Pediatr Urol. 2018;14(4):336.e1-336.e8. DOI: 10.1016/j.jpurol.2017.12.010
5. Silay MS, Danacioglu O, Ozel K, Karaman MI, Caskurlu T. Laparoscopy versus robotic-assisted pyeloplasty in children: preliminary results of a pilot prospective randomized controlled trial. World J Urol. 2020;38(8):1841-1848. DOI: 10.1007/s00345-019-02910-8
6. Sun M, Yu C, Zhao J, Liu M, Liu Y, Han R, Chen L, Wu S. The efficacy of robotic-assisted laparoscopic pyeloplasty for pediatric ureteropelvic junction obstruction: a systematic review and meta-analysis. Pediatr Surg Int. 2023;39(1):265. DOI: 10.1007/s00383-023-05541-8
7. Esposito C, Blanc T, Lardy H, Masieri L, Fourcade L, Mendoza-Sagaon M, Nappo S, Lopez M, Pelizzo G, Steyaert H, Gamba P, Scuderi MG, Escolino M, Castagnetti M, Chiarenza F, Ghoneimi AE. Robotic Surgery in Pediatric Urology: A Critical Appraisal of the GECI and SIVI Consensus of European Experts. J Laparoendosc Adv Surg Tech A. 2022;32(10):1108- 1113. DOI: 10.1089/lap.2021.0837
8. Esposito C, Cerulo M, Lepore B, Coppola V, D’Auria D, Esposito G, Carulli R, Del Conte F, Escolino M. Robotic-assisted pyeloplasty in children: a systematic review of the literature. J Robot Surg. 2023;17(4):1239- 1246. DOI: 10.1007/s11701-023-01559-1
9. Козлов Ю.А., Полоян С.С., Сапухин Э.В., Страшинский А.С., Макарочкина М.В., Марчук А.А., Рожанский А.П., Быргазов А.А., Муравьев С.А., Наркевич А.Н. Робот-ассистированная хирургия в детской урологии – первый опыт. Педиатрия им. Г.Н. Сперанского. 2024;103(1):138-145. DOI: 10.24110/0031-403X-2024-103-1-138-145
Владимир Валентинович Сизонов — д-р мед. наук, профессор
Ростов-на-Дону
Авторы заявляют об отсутствии конфликта интересов.
Алексей Геннадьевич Макаров — канд. мед. наук
Ростов-на-Дону
Авторы заявляют об отсутствии конфликта интересов.
Сергей Михайлович Пакус — канд. мед. наук
Ростов-на-Дону
Авторы заявляют об отсутствии конфликта интересов.
Давид Гиаевич Кварацхелия
Ростов-на-Дону
Авторы заявляют об отсутствии конфликта интересов.
Елена Владимировна Орлова
Ростов-на-Дону
Авторы заявляют об отсутствии конфликта интересов.
Светлана Геннадьевна Пискунова — канд. мед. наук
Ростов-на-Дону
Авторы заявляют об отсутствии конфликта интересов.
Михаил Иосифович Коган — д-р мед. наук, профессор, заслуженный деятель науки РФ
Ростов-на-Дону
Авторы заявляют об отсутствии конфликта интересов.
Сизонов В.В., Макаров А.Г., Пакус С.М., Кварацхелия Д.Г., Орлова Е.В., Пискунова С.Г., Коган М.И. Первый российский опыт робот-ассистированной лапароскопической пластики лоханочно-мочеточникового сегмента у детей на роботической системе da Vinci Xi. Вестник урологии. 2025;13(2):47-54. https://doi.org/10.21886/2308-6424-2025-13-2-47-54
Sizonov V.V., Makarov A.G., Pakus S.M., Kvaratskhelia D.G., Orlova E.V., Piskunova S.G., Kogan M.I. Robot-assisted laparoscopic ureteropelvic junction plasty in children using the da Vinci Xi robotic system: a Russian first experience. Urology Herald. 2025;13(2):47-54. (In Russ.) https://doi.org/10.21886/2308-6424-2025-13-2-47-54
Главный редактор
 Владимир Павлович Глухов
Владимир Павлович Глухов
344022, Россия, г. Ростов-на-Дону, пер. Нахичеванский, д. 29
тел.: +7 (863) 201-44-48
e-mail: urovest@mail.ru
Обработка персональных данных






































